Tutorial 14 — Beam pattern × scene integration (W-band down-looking)#
A radar does not sample its boresight pixel; it samples a pattern-weighted integral over its solid angle. When the scene is homogeneous, the closed-form \(\sigma_\mathrm{beam}\) used in Tutorial 13 captures everything. When the scene has structure on scales comparable to (or finer than) the beam footprint — convective cells, updraft/downdraft couplets, reflectivity gradients — that closed form fails and the beam has to be integrated explicitly.
Two properties of the pattern matter independently:
Main-lobe width. A 1° beam at 15 km range has a ≈ 260 m footprint; a 3° beam has ≈ 780 m. Features narrower than the footprint are smeared.
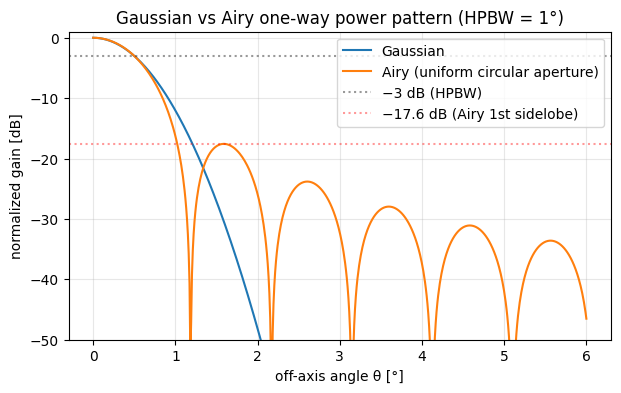
Sidelobes. A uniform circular aperture has an Airy first sidelobe at −17.6 dB. A distant bright cell sitting in that sidelobe can dominate the moments if the main lobe is pointed at a quiet patch.
This notebook uses the new rustmatrix.spectra.beam module. A
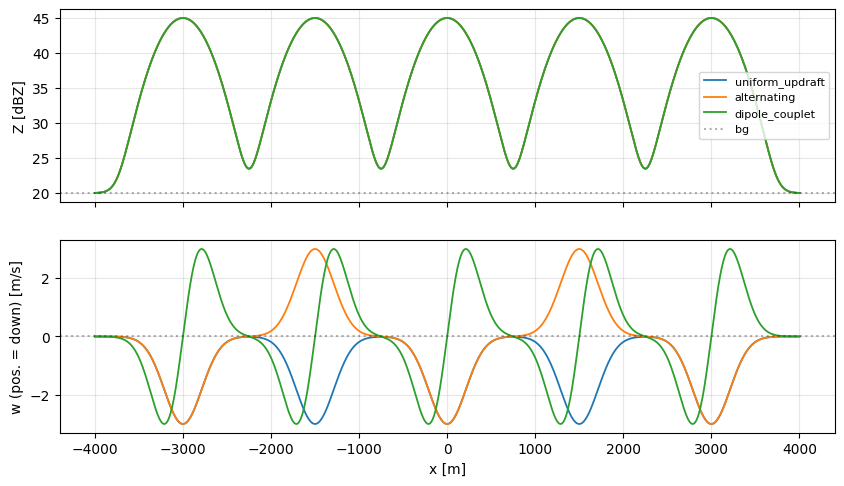
down-looking radar at 20 km altitude scans across a synthetic rain
scene: 20 dBZ Marshall-Palmer background with 500-m-wide 45 dBZ
cells spaced every 1.5 km. Each cell carries a co-located vertical
motion — three combinations are explored:
uniform_updraft — every cell is a 3 m/s updraft.
alternating — adjacent cells alternate −3 / +3 m/s.
dipole_couplet — each cell is an updraft/downdraft dipole straddling the enhanced-Z peak.
Each scene is sampled with 1° and 3° beams, in both Gaussian and Airy patterns. Horizontal wind is zero throughout — we isolate the scene-structure contribution to beam broadening here; Tutorial 13 covered the uniform-wind case.
import numpy as np
import matplotlib.pyplot as plt
from rustmatrix import Scatterer
from rustmatrix.psd import PSDIntegrator
from rustmatrix.refractive import m_w_10C
from rustmatrix.spectra import brandes_et_al_2002
from rustmatrix.spectra.beam import (AiryBeam, BeamIntegrator, GaussianBeam,
Scene, marshall_palmer_psd_factory)
from rustmatrix.tmatrix_aux import (K_w_sqr, dsr_thurai_2007,
geom_vert_back, wl_W)
RADAR_ALTITUDE_M = 20000.0
TARGET_ALTITUDE_M = 3000.0
RANGE_M = RADAR_ALTITUDE_M - TARGET_ALTITUDE_M
RAIN_TOP_M = 5000.0
BG_DBZ = 20.0
CELL_PEAK_DBZ = 45.0
CELL_WIDTH_M = 500.0
CELL_SIGMA_M = CELL_WIDTH_M / (2.0 * np.sqrt(2.0 * np.log(2.0)))
CELL_CENTERS_X = np.arange(-3000.0, 3001.0, 1500.0)
W_PEAK = 3.0
SCAN_X = np.linspace(-4000.0, 4000.0, 81)
V_MIN, V_MAX, N_BINS = -5.0, 15.0, 384
Beam-pattern comparison#
Before running the full scene sweep, look at the two candidate patterns at identical HPBW. The Gaussian taper has no sidelobes; the Airy pattern has nulls and a first sidelobe at −17.6 dB.
theta = np.linspace(0, np.deg2rad(6), 600)
gb = GaussianBeam(hpbw=np.deg2rad(1.0))
ab = AiryBeam(hpbw=np.deg2rad(1.0))
fig, ax = plt.subplots(figsize=(7, 4))
ax.plot(np.rad2deg(theta), 10 * np.log10(np.clip(gb.gain(theta), 1e-6, None)),
label='Gaussian', lw=1.5)
ax.plot(np.rad2deg(theta), 10 * np.log10(np.clip(ab.gain(theta), 1e-6, None)),
label='Airy (uniform circular aperture)', lw=1.5)
ax.axhline(-3, c='k', ls=':', alpha=0.4, label='−3 dB (HPBW)')
ax.axhline(-17.6, c='r', ls=':', alpha=0.4, label='−17.6 dB (Airy 1st sidelobe)')
ax.set_xlabel('off-axis angle θ [°]')
ax.set_ylabel('normalized gain [dB]')
ax.set_ylim(-50, 1)
ax.set_title('Gaussian vs Airy one-way power pattern (HPBW = 1°)')
ax.legend()
ax.grid(alpha=0.3);
Build the scene#
Each scene is a triple of callables (Z_dBZ, w, u_h) evaluated at
pixel positions. We bake in the rain top at 5 km (above that the
scene is empty), the cell grid, and the three vertical-motion
variants.
def make_scene(pattern):
centers = CELL_CENTERS_X
sigma = CELL_SIGMA_M
z_top = RAIN_TOP_M
Z_bg_lin = 10.0 ** (BG_DBZ / 10.0)
Z_peak_excess = 10.0 ** (CELL_PEAK_DBZ / 10.0) - Z_bg_lin
def Z_dBZ(x, y, z):
mask = (z >= 0) & (z <= z_top)
Z_lin = np.where(mask, Z_bg_lin, 1e-10)
for xc in centers:
bump = Z_peak_excess * np.exp(-0.5 * ((x - xc) / sigma) ** 2)
Z_lin = Z_lin + bump * mask
return 10.0 * np.log10(np.maximum(Z_lin, 1e-10))
if pattern == 'uniform_updraft':
signs = -np.ones(len(centers))
elif pattern == 'alternating':
signs = np.array([-1.0 if i % 2 == 0 else 1.0
for i in range(len(centers))])
elif pattern == 'dipole_couplet':
signs = None
else:
raise ValueError(pattern)
def w_fn(x, y, z):
mask = (z >= 0) & (z <= z_top)
w_total = np.zeros_like(x)
for i, xc in enumerate(centers):
arg = (x - xc) / sigma
if signs is None:
w_total = w_total + W_PEAK * arg * np.exp(0.5 - 0.5 * arg ** 2)
else:
w_total = w_total + signs[i] * W_PEAK * np.exp(-0.5 * arg ** 2)
return w_total * mask
def u_h_fn(x, y, z):
return np.zeros_like(x)
return Scene(Z_dBZ=Z_dBZ, w=w_fn, u_h=u_h_fn, u_h_azimuth=0.0)
# Visualize each scene along the x-axis at z = TARGET_ALTITUDE_M.
x_vis = np.linspace(-4000, 4000, 801)
zero = np.zeros_like(x_vis)
z_target = np.full_like(x_vis, TARGET_ALTITUDE_M)
fig, (axZ, axW) = plt.subplots(2, 1, figsize=(10, 5.5), sharex=True)
for name in ('uniform_updraft', 'alternating', 'dipole_couplet'):
sc = make_scene(name)
axZ.plot(x_vis, sc.Z_dBZ(x_vis, zero, z_target), label=name, lw=1.3)
axW.plot(x_vis, sc.w(x_vis, zero, z_target), label=name, lw=1.3)
axZ.set_ylabel('Z [dBZ]')
axZ.axhline(BG_DBZ, c='k', ls=':', alpha=0.3, label='bg')
axZ.legend(fontsize=8)
axZ.grid(alpha=0.3)
axW.set_xlabel('x [m]')
axW.set_ylabel('w (pos. = down) [m/s]')
axW.axhline(0, c='k', ls=':', alpha=0.3)
axW.grid(alpha=0.3);
W-band rain scatterer and the scan sweep#
The BeamIntegrator takes the scatterer, beam pattern, scene, and
a PSD factory (Z → PSD mapping — Marshall–Palmer here) and returns
a SpectralResult identical to the one produced by the ordinary
SpectralIntegrator. We run it once per scan position.
rain = Scatterer(wavelength=wl_W, m=m_w_10C[wl_W],
Kw_sqr=K_w_sqr[wl_W], ddelt=1e-4, ndgs=2)
integ = PSDIntegrator()
integ.D_max = 5.0
integ.num_points = 48
integ.axis_ratio_func = lambda D: 1.0 / dsr_thurai_2007(D)
integ.geometries = (geom_vert_back,)
rain.psd_integrator = integ
rain.psd_integrator.init_scatter_table(rain)
psd_factory = marshall_palmer_psd_factory(N0=8000.0, D_max=5.0)
def moments(v, sZh):
sZh = np.clip(sZh, 0.0, None)
P = sZh.sum()
if P <= 0:
return -np.inf, np.nan, np.nan
dv = np.mean(np.diff(v))
Z_dBZ = 10.0 * np.log10(max(P * dv, 1e-10))
mu = float((v * sZh).sum() / P)
var = float(((v - mu) ** 2 * sZh).sum() / P)
return Z_dBZ, mu, float(np.sqrt(max(var, 0.0)))
def sweep(scene, beam):
Zs = np.empty_like(SCAN_X)
mus = np.empty_like(SCAN_X)
sigs = np.empty_like(SCAN_X)
for i, xr in enumerate(SCAN_X):
bi = BeamIntegrator(
scatterer=rain, beam=beam, scene=scene,
psd_factory=psd_factory, fall_speed=brandes_et_al_2002,
radar_position=(xr, 0.0, RADAR_ALTITUDE_M),
boresight=(0.0, 0.0, -1.0), range_m=RANGE_M,
v_min=V_MIN, v_max=V_MAX, n_bins=N_BINS,
n_theta=16, n_phi=16,
)
r = bi.run()
Zs[i], mus[i], sigs[i] = moments(r.v, r.sZ_h)
return Zs, mus, sigs
PATTERNS = ('uniform_updraft', 'alternating', 'dipole_couplet')
BEAMS = (
('gaussian', 1.0, GaussianBeam(hpbw=np.deg2rad(1.0))),
('airy', 1.0, AiryBeam(hpbw=np.deg2rad(1.0))),
('gaussian', 3.0, GaussianBeam(hpbw=np.deg2rad(3.0))),
('airy', 3.0, AiryBeam(hpbw=np.deg2rad(3.0))),
)
results = {}
for pattern in PATTERNS:
scene = make_scene(pattern)
for kind, hpbw_deg, beam in BEAMS:
results[(pattern, kind, hpbw_deg)] = sweep(scene, beam)
print(f' {pattern:18s} done')
uniform_updraft done
alternating done
dipole_couplet done
Scan curves — moments vs radar x position#
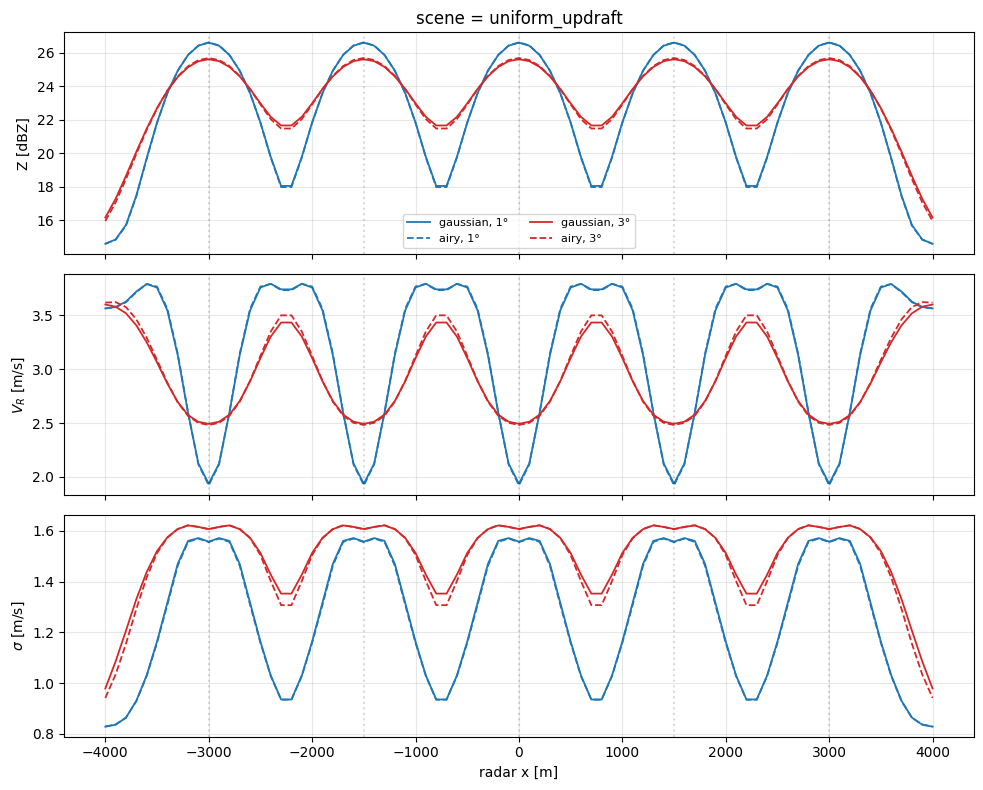
For each scene, plot \(Z\), \(V_R\) (Doppler velocity, first moment), and \(\sigma\) (spectral width) as the radar sweeps across the cell grid. Compare how narrow (1°) and wide (3°) beams resolve the structure, and how the Airy sidelobes leak in neighbouring-cell signal even when the main lobe is off a peak.
def plot_scan(pattern):
fig, axes = plt.subplots(3, 1, figsize=(10, 8), sharex=True)
styles = {('gaussian', 1.0): ('tab:blue', '-'),
('airy', 1.0): ('tab:blue', '--'),
('gaussian', 3.0): ('tab:red', '-'),
('airy', 3.0): ('tab:red', '--')}
for (kind, hpbw_deg), (c, ls) in styles.items():
Zs, mus, sigs = results[(pattern, kind, hpbw_deg)]
lbl = f'{kind}, {hpbw_deg:.0f}°'
axes[0].plot(SCAN_X, Zs, c=c, ls=ls, lw=1.3, label=lbl)
axes[1].plot(SCAN_X, mus, c=c, ls=ls, lw=1.3)
axes[2].plot(SCAN_X, sigs, c=c, ls=ls, lw=1.3)
# mark cell centers
for xc in CELL_CENTERS_X:
for ax in axes:
ax.axvline(xc, c='k', ls=':', alpha=0.15)
axes[0].set_ylabel('Z [dBZ]')
axes[1].set_ylabel(r'$V_R$ [m/s]')
axes[2].set_ylabel(r'$\sigma$ [m/s]')
axes[2].set_xlabel('radar x [m]')
axes[0].set_title(f'scene = {pattern}')
axes[0].legend(fontsize=8, ncol=2)
for ax in axes:
ax.grid(alpha=0.3)
fig.tight_layout()
return fig
for p in PATTERNS:
plot_scan(p);
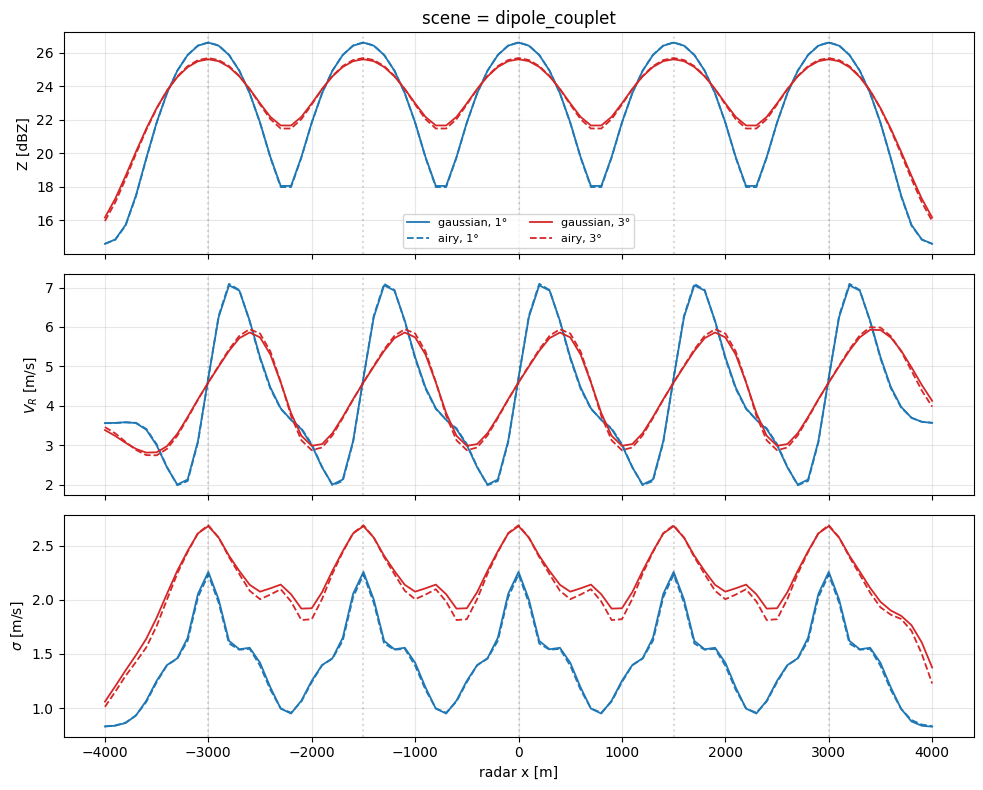
Interpretation#
Narrow (1°) vs wide (3°) main lobes. The 1° beam’s ~260 m footprint is narrower than the 500 m cell, so \(Z\) resolves the full peak-to-trough swing (\(\approx\)25 dB). The 3° beam averages across neighbouring cells and the peak-to-trough contrast drops to a few dB.
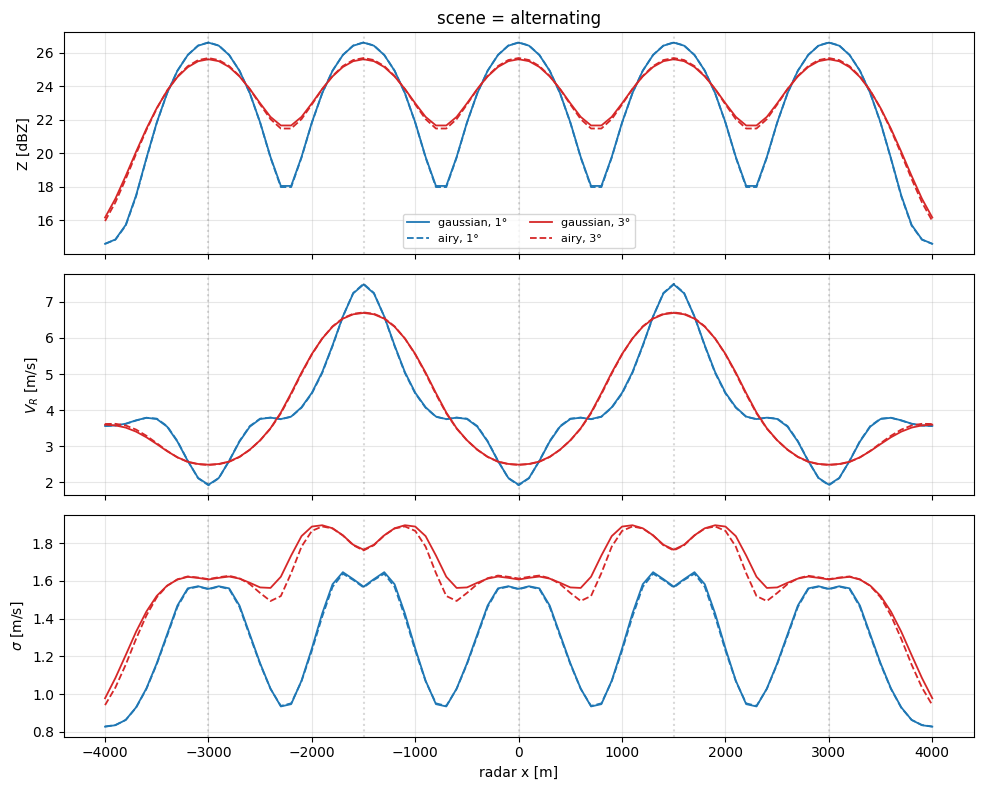
Gaussian vs Airy (same HPBW). The main-lobe difference is small — both patterns integrate a similar main-lobe footprint of reflectivity. The sidelobes of the Airy pattern pick up signal from cells up to \(\pm 2\) km away, leaking a small bias into the inter-cell minima. The
alternatinganddipole_coupletscenes show this most clearly: at the between-cell location, Airy’s \(V_R\) is shifted toward the nearer cell’s velocity while Gaussian is closer to zero (the DSD-intrinsic rest frame).uniform_updraft vs alternating. Both start from the same Z field, but in
alternatingadjacent cells pull \(V_R\) in opposite directions — when the 3° beam straddles a boundary it sees a bimodal spectrum whose first moment can land near zero even though both contributing populations are strongly non-still. This is the physical origin of the “turbulence” signature in spectral-width retrievals over convection.dipole_couplet. At the cell centre the beam averages equal up- and downdraft power, giving \(V_R \approx v_t\) (DSD-only) and an inflated \(\sigma\) — the classic bimodal-spectrum fingerprint. The 3° beam smooths over more of the couplet, narrowing the apparent \(\sigma\) swing.
Practical take. Any moment retrieval that assumes a pencil beam and homogeneous scene is subtracting the wrong amount of “beam broadening” from the observed \(\sigma\). The
BeamIntegratorlets you attach a forward model to a scene and an instrument specification, and returns spectra and moments that the observed radar actually would see.
Interactive exploration — cell spacing#
The sweep above used 1.5 km spacing between cells. What happens
when that spacing shrinks below the beam footprint, or grows to
where even a wide beam resolves the cells cleanly? The slider
below varies the spacing from 100 m (far finer than either
beam footprint) to 10 km (fully resolved by both). At fine
spacings the alternating pattern’s \(V_R\) collapses toward zero
— adjacent up- and downdrafts average inside the pattern — while
\(\sigma\) balloons because the spectrum becomes bimodal. At coarse
spacings the 1° and 3° beams converge on the same answer because
both now resolve the scene.
This widget drives the same BeamIntegrator used above, but on a
coarser scan (41 x-positions, 10×10 beam samples) so each slider
change completes in a few seconds.
import ipywidgets as widgets
FAST_SCAN_X = np.linspace(-4000.0, 4000.0, 41)
def _scene_at_spacing(pattern, spacing_m):
centers = np.arange(-4000.0, 4000.0 + 1e-6, spacing_m)
sigma = CELL_SIGMA_M
z_top = RAIN_TOP_M
Z_bg_lin = 10.0 ** (BG_DBZ / 10.0)
Z_peak_excess = 10.0 ** (CELL_PEAK_DBZ / 10.0) - Z_bg_lin
def Z_dBZ(x, y, z):
mask = (z >= 0) & (z <= z_top)
Z_lin = np.where(mask, Z_bg_lin, 1e-10)
for xc in centers:
bump = Z_peak_excess * np.exp(-0.5 * ((x - xc) / sigma) ** 2)
Z_lin = Z_lin + bump * mask
return 10.0 * np.log10(np.maximum(Z_lin, 1e-10))
if pattern == 'uniform_updraft':
signs = -np.ones(len(centers))
elif pattern == 'alternating':
signs = np.array([-1.0 if i % 2 == 0 else 1.0
for i in range(len(centers))])
elif pattern == 'dipole_couplet':
signs = None
else:
raise ValueError(pattern)
def w_fn(x, y, z):
mask = (z >= 0) & (z <= z_top)
w_total = np.zeros_like(x)
for i, xc in enumerate(centers):
arg = (x - xc) / sigma
if signs is None:
w_total = w_total + W_PEAK * arg * np.exp(0.5 - 0.5 * arg ** 2)
else:
w_total = w_total + signs[i] * W_PEAK * np.exp(-0.5 * arg ** 2)
return w_total * mask
def u_h_fn(x, y, z):
return np.zeros_like(x)
return Scene(Z_dBZ=Z_dBZ, w=w_fn, u_h=u_h_fn, u_h_azimuth=0.0), centers
def _fast_sweep(scene, beam):
mus = np.empty_like(FAST_SCAN_X)
sigs = np.empty_like(FAST_SCAN_X)
for i, xr in enumerate(FAST_SCAN_X):
bi = BeamIntegrator(
scatterer=rain, beam=beam, scene=scene,
psd_factory=psd_factory, fall_speed=brandes_et_al_2002,
radar_position=(xr, 0.0, RADAR_ALTITUDE_M),
boresight=(0.0, 0.0, -1.0), range_m=RANGE_M,
v_min=V_MIN, v_max=V_MAX, n_bins=192,
n_theta=10, n_phi=10,
)
r = bi.run()
_, mus[i], sigs[i] = moments(r.v, r.sZ_h)
return mus, sigs
def explore_spacing(spacing_m=1500.0, pattern='alternating'):
scene, centers = _scene_at_spacing(pattern, spacing_m)
g1 = GaussianBeam(hpbw=np.deg2rad(1.0))
g3 = GaussianBeam(hpbw=np.deg2rad(3.0))
mus1, sigs1 = _fast_sweep(scene, g1)
mus3, sigs3 = _fast_sweep(scene, g3)
x_vis = np.linspace(-4000, 4000, 801)
zero = np.zeros_like(x_vis)
z_target = np.full_like(x_vis, TARGET_ALTITUDE_M)
fig, axes = plt.subplots(3, 1, figsize=(10, 8), sharex=True)
axes[0].plot(x_vis, scene.Z_dBZ(x_vis, zero, z_target), 'k-', lw=1.0)
axes[0].set_ylabel('Z [dBZ]')
axes[1].plot(FAST_SCAN_X, mus1, color='tab:blue', lw=1.5, label='1° Gaussian')
axes[1].plot(FAST_SCAN_X, mus3, color='tab:red', lw=1.5, label='3° Gaussian')
axes[1].set_ylabel(r'$V_R$ [m/s]')
axes[1].legend(fontsize=8, loc='best')
axes[2].plot(FAST_SCAN_X, sigs1, color='tab:blue', lw=1.5)
axes[2].plot(FAST_SCAN_X, sigs3, color='tab:red', lw=1.5)
axes[2].set_ylabel(r'$\sigma$ [m/s]')
axes[2].set_xlabel('radar x [m]')
for xc in centers:
for ax in axes:
ax.axvline(xc, color='k', ls=':', alpha=0.12)
for ax in axes:
ax.grid(alpha=0.3)
axes[0].set_title(f'pattern = {pattern}, spacing = {spacing_m:.0f} m, '
f'{len(centers)} cells')
fig.tight_layout()
plt.show()
spacing_slider = widgets.FloatLogSlider(
value=1500.0, base=10,
min=np.log10(100.0), max=np.log10(10000.0),
step=0.02, description='spacing [m]',
readout_format='.0f', continuous_update=False,
)
pattern_dd = widgets.Dropdown(
options=['uniform_updraft', 'alternating', 'dipole_couplet'],
value='alternating', description='pattern',
)
widgets.interact(explore_spacing, spacing_m=spacing_slider, pattern=pattern_dd);